UAVCAN GUI Tool
UAVCAN GUI Tool is a cross-platform free open source application for UAVCAN bus management and diagnostics. It runs on Windows, Linux, and OSX.
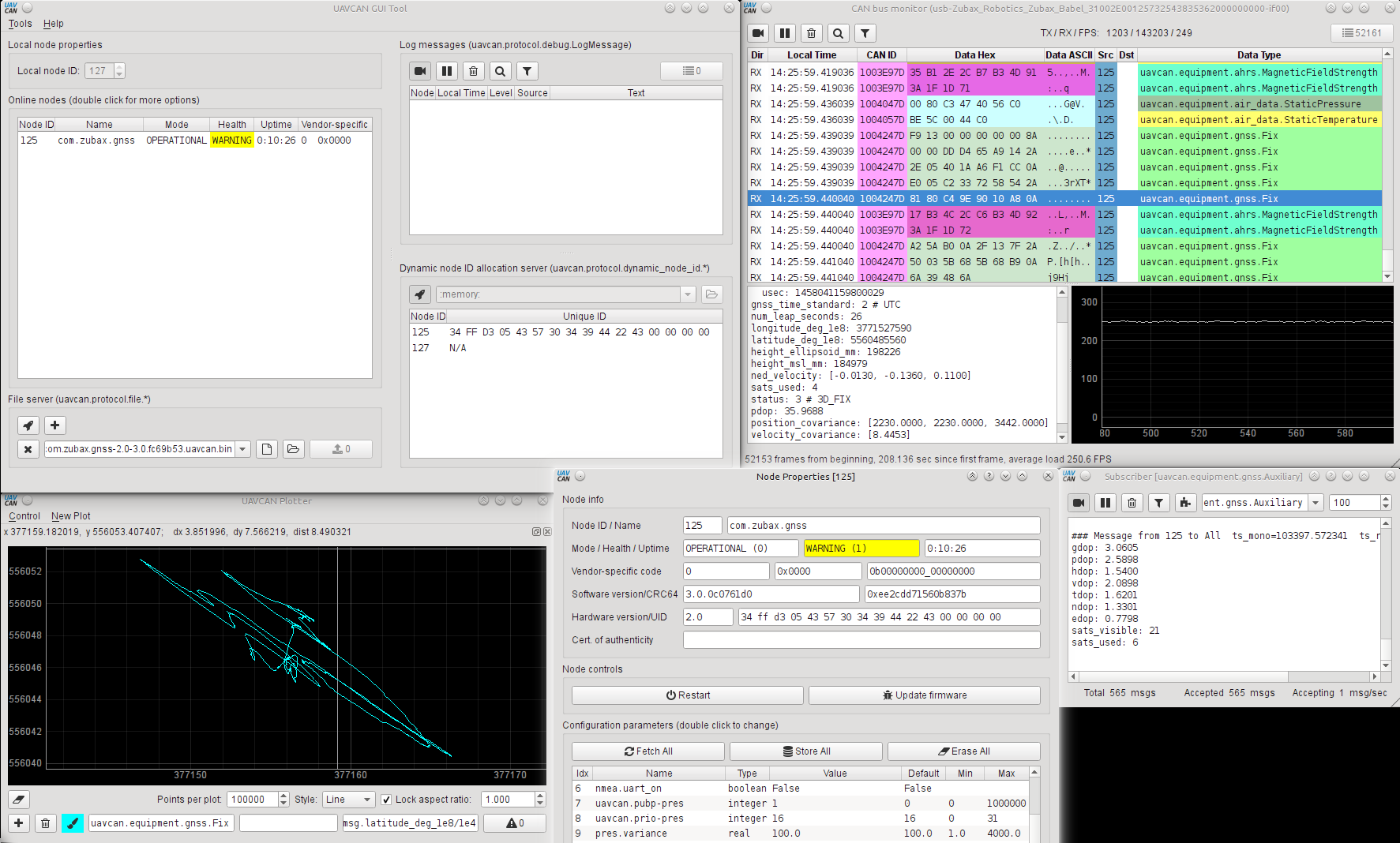
- Real time monitoring of CAN bus and UAVCAN transfer dissection.
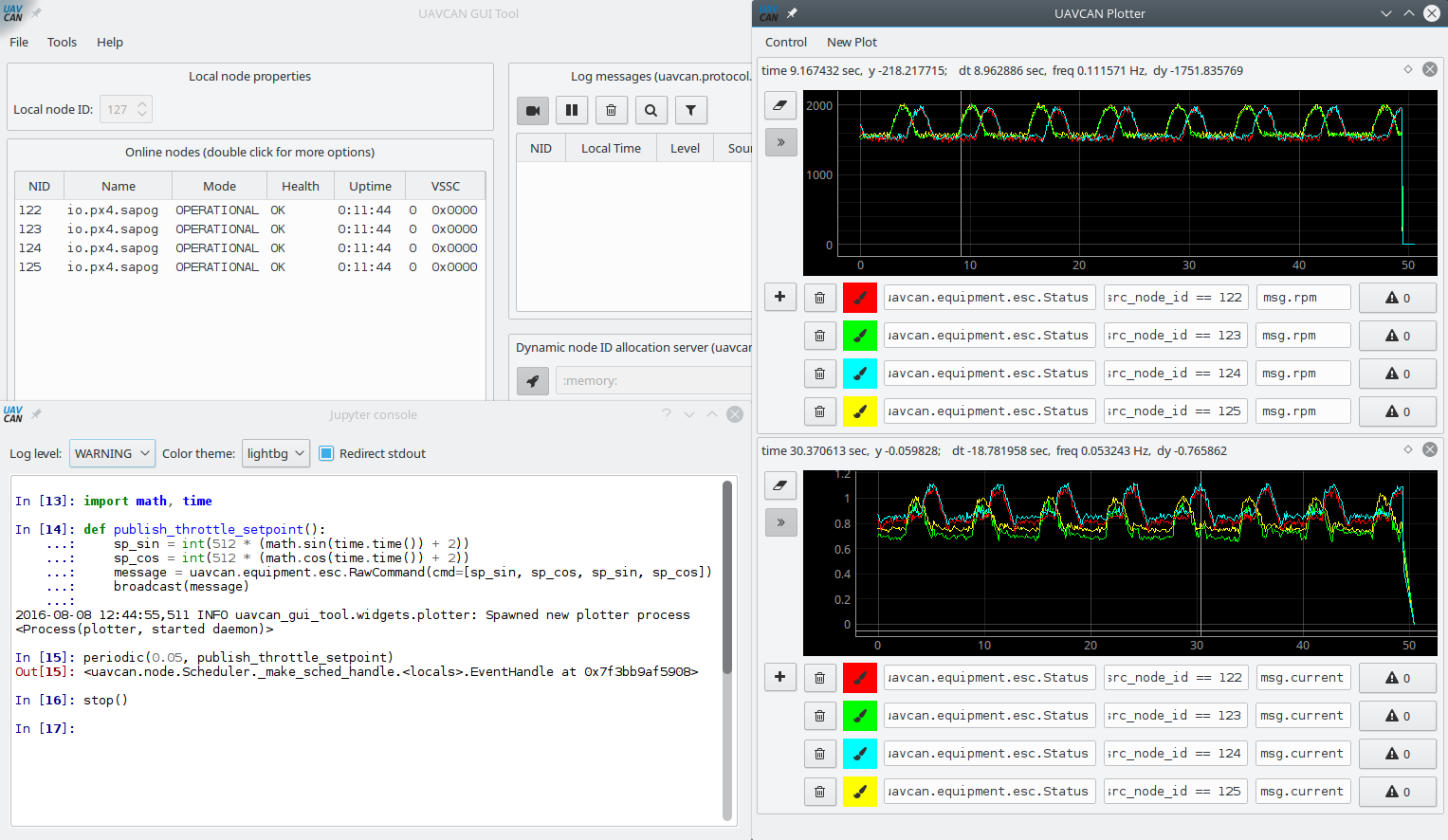
- Plotting values in real time.
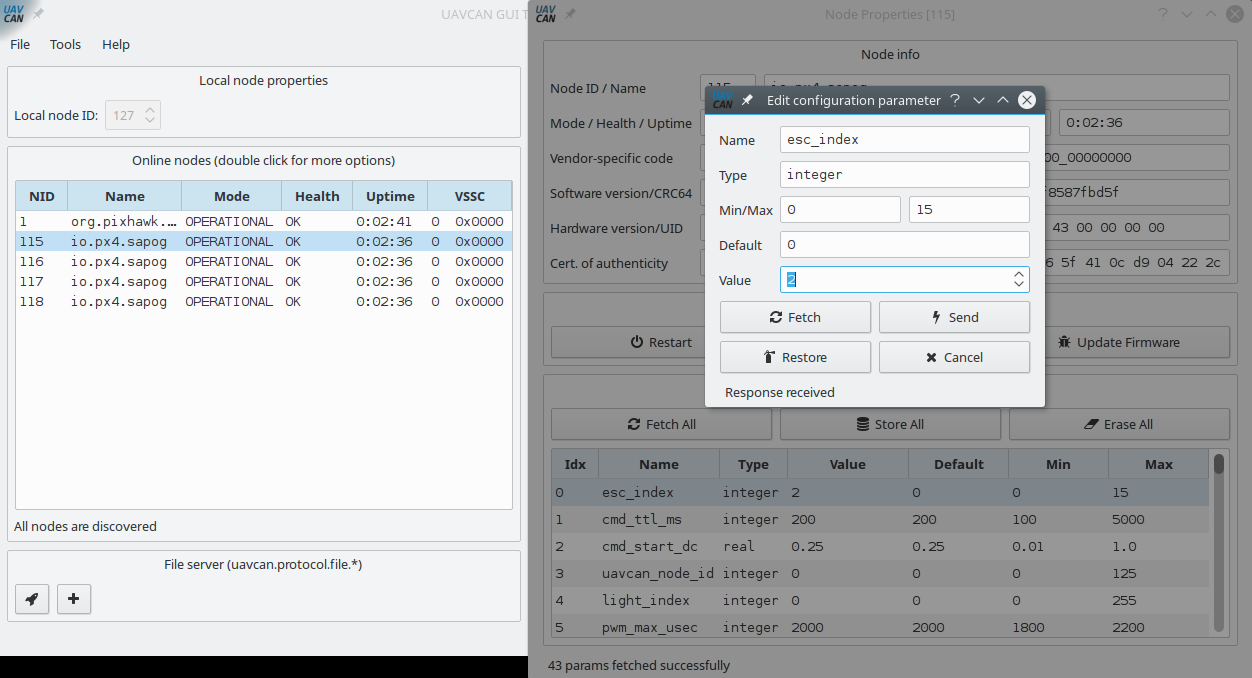
- Remote node reconfiguration (
uavcan.protocol.param). - Firmware update on remote nodes.
- Python scripting from the embedded IPython console.
- Different CAN adapter backends supported:
- SLCAN (aka LAWICEL) adapters, e.g. Zubax Babel.
- Linux SocketCAN.
Installation
Windows
Download and install the latest MSI package from https://files.zubax.com/products/org.uavcan.gui_tool.
Linux
Note that if you’re using a USB SLCAN adapter, it may be necessary to configure serial port access permissions.
Ubuntu, Mint, and other Debian-based distros
sudo apt-get install -y python3-pip python3-setuptools python3-wheel
sudo apt-get install -y python3-numpy python3-pyqt5 python3-pyqt5.qtsvg git-core
sudo pip3 install git+https://github.com/UAVCAN/gui_tool@master
Other distributions
Please refer to the README file in the source repository: https://github.com/UAVCAN/gui_tool.
OSX
Please refer to the README file in the source repository: https://github.com/UAVCAN/gui_tool.
Feedback
Direct your questions and feedback to the mailing list or the chat room.
Pull requests and bug reports are welcome at the GitHub repository at https://github.com/UAVCAN/gui_tool.