ESC throttle control
This example script demonstrates how to control ESC throttle setpoint using the Pyuavcan library. Before running the script, make sure that no other node on the bus issues contradictory ESC commands concurrently.
Writing the script
One code sample is worth 1024 words:
#!/usr/bin/env python3
import uavcan, time, math
# Publishing setpoint values from this function; it is invoked periodically from the node thread.
def publish_throttle_setpoint():
# Generating a sine wave
setpoint = int(512 * (math.sin(time.time()) + 2))
# Commanding ESC with indices 0, 1, 2, 3 only
commands = [setpoint, setpoint, setpoint, setpoint]
message = uavcan.equipment.esc.RawCommand(cmd=commands)
node.broadcast(message)
if __name__ == '__main__':
# Initializing a UAVCAN node instance.
# In this example we're using an SLCAN adapter on the port '/dev/ttyACM0'.
# PyUAVCAN also supports other types of adapters, refer to the docs to learn more.
node = uavcan.make_node('/dev/ttyACM0', node_id=10, bitrate=1000000)
# Initializing a dynamic node ID allocator.
# This would not be necessary if the nodes were configured to use static node ID.
node_monitor = uavcan.app.node_monitor.NodeMonitor(node)
dynamic_node_id_allocator = uavcan.app.dynamic_node_id.CentralizedServer(node, node_monitor)
# Waiting for at least one other node to appear online (our local node is already online).
while len(dynamic_node_id_allocator.get_allocation_table()) <= 1:
print('Waiting for other nodes to become online...')
node.spin(timeout=1)
# This is how we invoke the publishing function periodically.
node.periodic(0.05, publish_throttle_setpoint)
# Printing ESC status message to stdout in human-readable YAML format.
node.add_handler(uavcan.equipment.esc.Status, lambda msg: print(uavcan.to_yaml(msg)))
# Running the node until the application is terminated or until first error.
try:
node.spin()
except KeyboardInterrupt:
pass
Running the script
Save the above code somewhere and run it. The connected ESC will be changing their RPM in a sine pattern, slowly accelerating and decelerating. The script will periodically print output similar to this:
### Message from 124 to All ts_mono=19376.645693 ts_real=1470440665.872391
error_count: 0
voltage: 13.2812
current: 1.3379
temperature: 313.15
rpm: 1514
power_rating_pct: 13
esc_index: 3
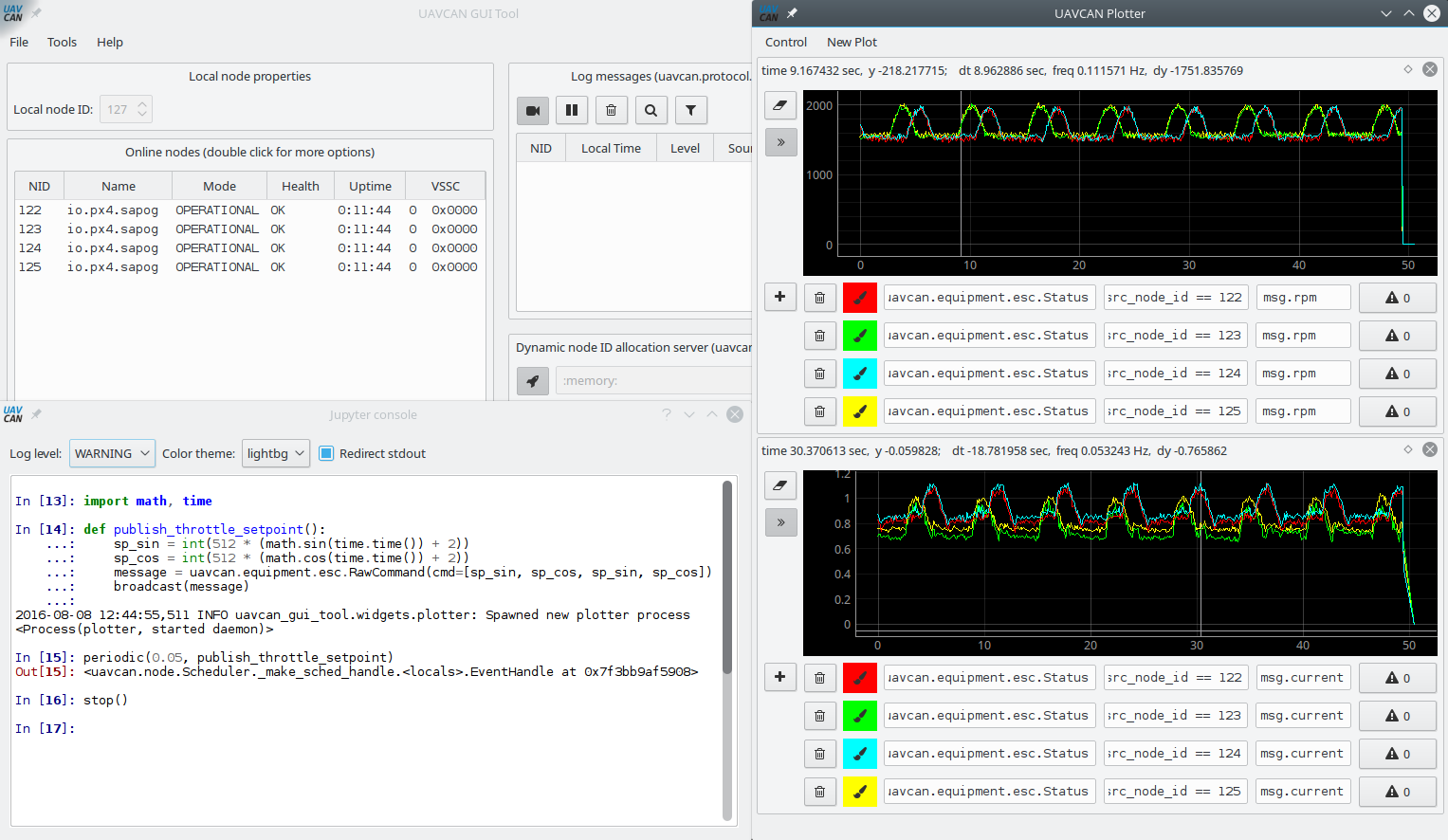
Using the UAVCAN GUI Tool
It is also possible to run the above script (with minor modifications) directly from the interactive console of the UAVCAN GUI Tool, because the UAVCAN GUI Tool is built on top of Pyuavcan. In that case you won’t need to create a new node yourself in the script - just use the application’s own node, it is accessible from the interactive console. For details, please read the documentation of the UAVCAN GUI Tool.